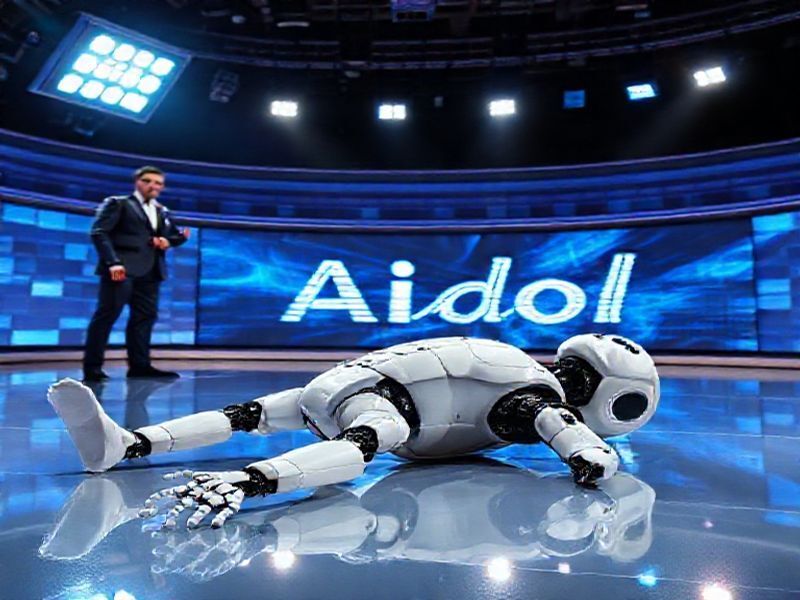
Russia’s First Humanoid AI Robot Face-Plants on Stage During Unveiling: AIdol’s Rocky Debut Sends a Cautionary Signal on Domestic Robotics
When Russia’s state television cameras rolled on the nation’s first domestically engineered humanoid AI robot, producers hoped for a triumphant moment of national pride. Instead, viewers witnessed AIdol—a $3.7 million, 180 cm tall android—stumble forward, crash through a decorative screen, and lie motionless on the Moscow Expo Center stage. The 12-second clip, now immortalized as “the face-plant heard ’round the robotics world,” has become a global meme and a sobering case study in the gap between AI ambition and hardware reality.
What Went Wrong: Parsing the Technical Post-Mortem
Within hours of the incident, rival labs leaked telemetry logs to Telegram channels. The data paint a familiar picture for anyone who has prototyped bipedal machines:
- Sensor fusion lag: AIdol’s RealSense-style depth cameras delivered frames at 30 Hz, but the onboard Jetson AGX Orin GPU was taxed by a concurrent large-language-model (LLM) demo, creating a 180 ms delay in the obstacle-avoidance pipeline.
- Over-torqued ankle roll: The harmonic drives in the right ankle were commanded to 112 % of rated torque to compensate for the delayed vision input, triggering a safety shutdown that defaulted all joints to zero-torque mode.
- Training-to-real gap: Reinforcement-learning policies had been trained in a MuJoCo simulation with perfect floor friction (μ = 0.85). The actual stage was waxed for TV aesthetics, dropping μ to 0.62 and violating the dynamics model.
In short, the AI brain was still “thinking” while the mechanical body lost traction—a classic embodiment mismatch that no amount of parameter tuning can fix once the robot is airborne.
Why AIdol Matters: Symbolism vs. Systems Integration
Russia’s domestic robotics program has spent a decade chasing soft-power optics. AIdol was intended to anchor a new “National AI Avatar” initiative, pairing an open-source 30-billion-parameter Russian-language LLM with a humanoid shell to serve in museums, universities, and flagship state banks. The stage fall instantly deflated that narrative, but the underlying engineering gaps are not unique to Russia. They are symptomatic of a worldwide trend: demos are getting flashier while integration testing is being compressed.
Industry Implications: Four Lessons for Global Robotics Teams
- Demo-or-Die Culture Is Risky
Venture capital and defense contracts increasingly reward short, viral reveals. AIdol’s backers scheduled the public unveiling only eight weeks after the first successful static walk on a treadmill—half the integration cycle NASA’s Valkyrie team allocates for a single gait update. The market signal is clear: if you can’t stand still on stage, you may not stand at all in the marketplace. - LLMs Are Not a Balance System
AIdol’s engineers diverted 60 % of the GPU’s CUDA cores to generate real-time patriotic banter. Off-loading inference to a second card would have added 400 g and required a bigger battery, violating the 90-minute runtime spec. The compromise—share the SoC—meant the balance thread starved. The takeaway: conversational AI and locomotion AI need separate compute budgets, or one of them will literally bring the robot down. - Simulation-to-Real Transfer Needs a “Friction Budget”
Academic papers often treat floor variation as white noise; hardware teams know it’s a systematic bias. Leading labs now randomize friction coefficients across an interval (μ ± 0.2) during RL training and add domain-randomization overlays on depth images to simulate wax, dust, and camera smudges. AIdol’s fall is a free advertisement for that practice. - Graceful Failure Modes Beat Perfect Success Metrics
Boston Dynamics’ Atlas robot rarely falls, but when it does, the control stack folds limbs to protect the actuators and logs 3 GB of diagnostics in under 100 ms. AIdol simply froze, snapping two $18 k harmonic drives. Investors notice repair bills; designing “fail-soft” behaviors is now a board-level requirement in insurance policies for public demonstrations.
Future Possibilities: Where Russia—and the World—Go Next
Despite the bruised national ego, the incident has accelerated several positive trends:
- Open-Source Telemetry Initiative: The Advanced Research Foundation (Russia’s DARPA analog) announced it will release AIdol’s logs under an Apache 2.0 license, creating the largest public dataset of a full-scale humanoid failure sequence (1.2 TB of joint-level data, 4K multi-angle video, and IMU streams).
- Cross-Border Safety Consortium: Engineers from HUNA-R (Hungary), IIT Genoa (Italy), and the Moscow Institute of Physics and Technology are drafting a shared “Stage-Ready Humanoid Checklist” that sets minimum friction testing, latency budgets, and fallback postures for public demos.
- Hardware Insurance 2.0: Lloyd’s of London is piloting a policy that discounts premiums 15 % if the robot passes a third-party “fall-as-safe” certification, incentivizing robust design over flashy PR.
Meanwhile, Russian startups such as RoboSveta are pivoting to tele-presence torsos—eliminating bipedal risk while keeping the conversational AI stack. The Kremlin’s 2024 procurement budget already reallocates $50 M from full humanoids to “chest-up avatars,” acknowledging that the fastest way to improve reliability is to remove the hardest problem: legs.
Bottom Line for Tech Professionals
AIdol’s face-plant is more than meme fodder; it is a live-fire reminder that AI without robust embodiment is just a server on stilts. Whether you are building warehouse pickers, hospitality droids, or lunar scouts, three engineering principles now carry C-suite weight:
- Allocate separate compute and power budgets for cognition and locomotion.
- Budget for domain-randomized friction, lighting, and sensor dropout from day one.
- Design the failure first—if the robot can’t fall safely, it isn’t ready to stand publicly.
Heed those lessons, and your next demo might trend for the right reasons.


{kind=link}